Autonomous Navigation
Technology (ANT)
NATURAL FEATURE NAVIGATION FOR YOUR AGV, AUTOMATED FORKLIFT OR MOBILE ROBOT
Your vehicle,
our navigation
ANT navigation technology is an accurate, robust and flexible solution that meets the evolving needs of vehicle producers and operators. Based on 22 years of industry experience, ANT is simple to use and cost-effective to install and modify. All BlueBotics products are FCC/CE certified.

Quick
TO INSTALL
& MODIFY

Accurate
TO
±1 cm / ±1°

Scalable
CREATE AN
ANT FLEET
These AGVs are equipped with a specific sensor to follow a physical line
on the ground (e.g. magnetic tape, inductive wire).
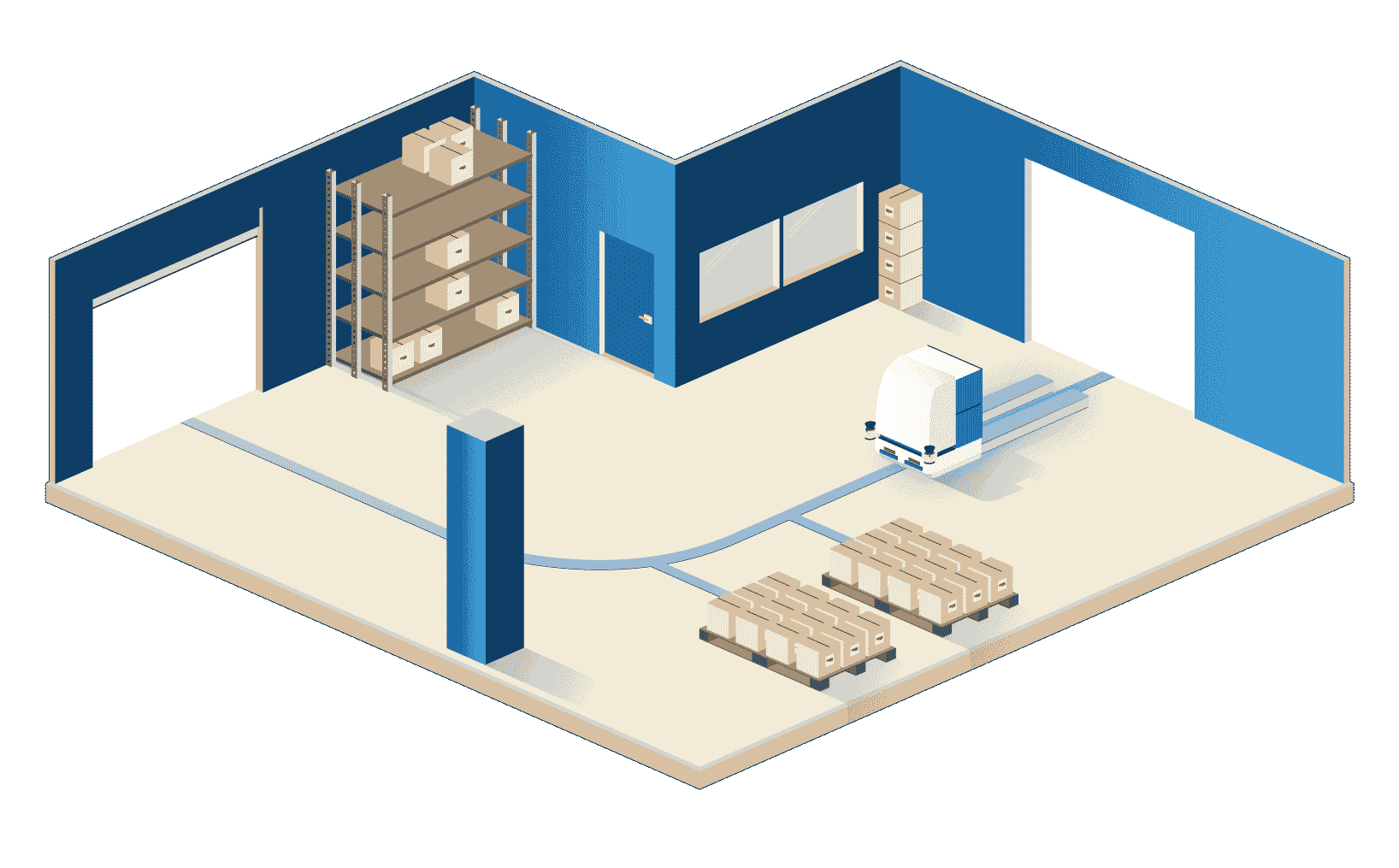
Pros
Cons
These vehicles are equipped with a specific sensor (e.g. a camera or code reader),
which follows a route defined by tags.
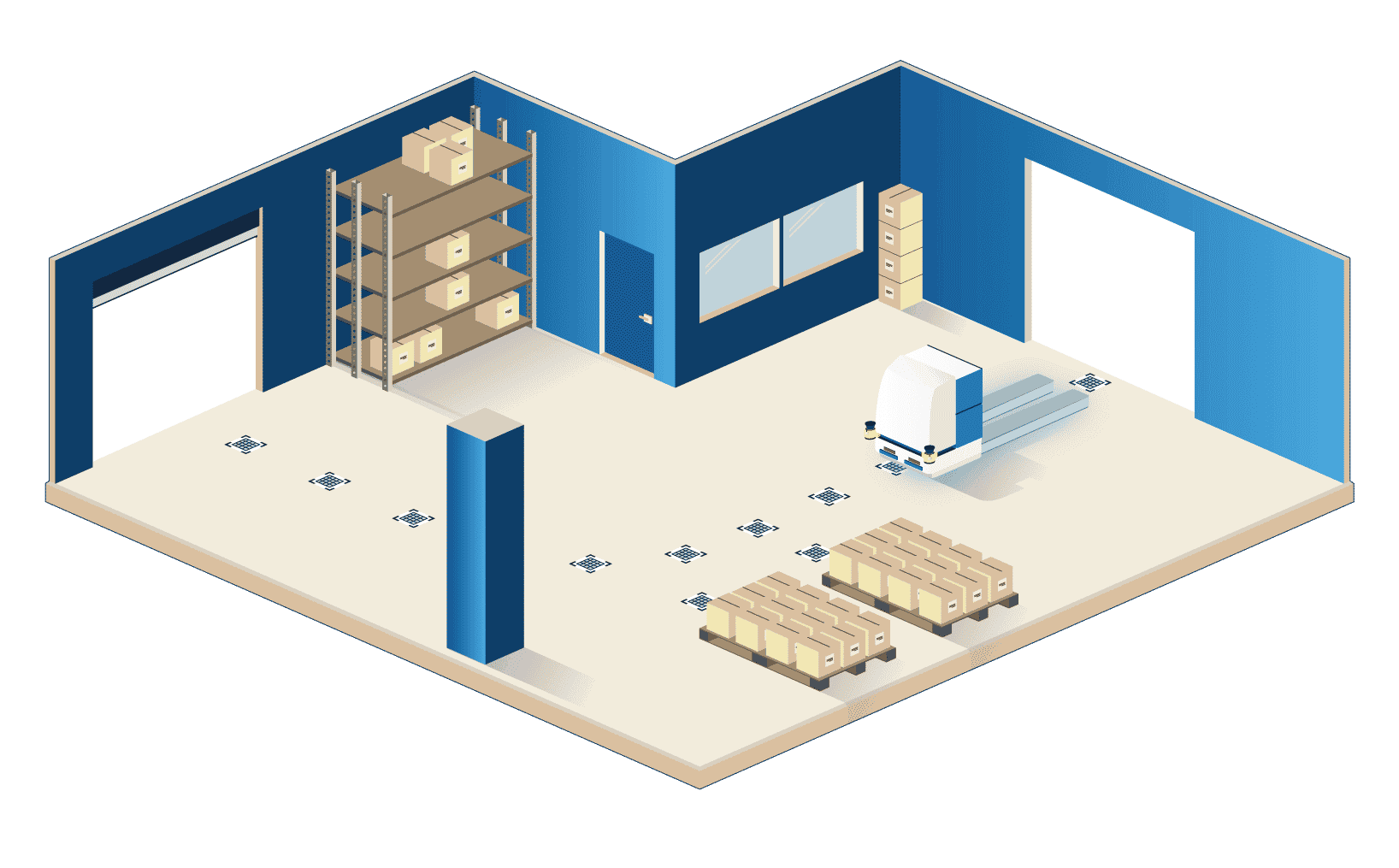
Pros
Cons
The position of the vehicle is triangulated using laser beams that are
reflected back from reflectors. The paths followed are virtual.
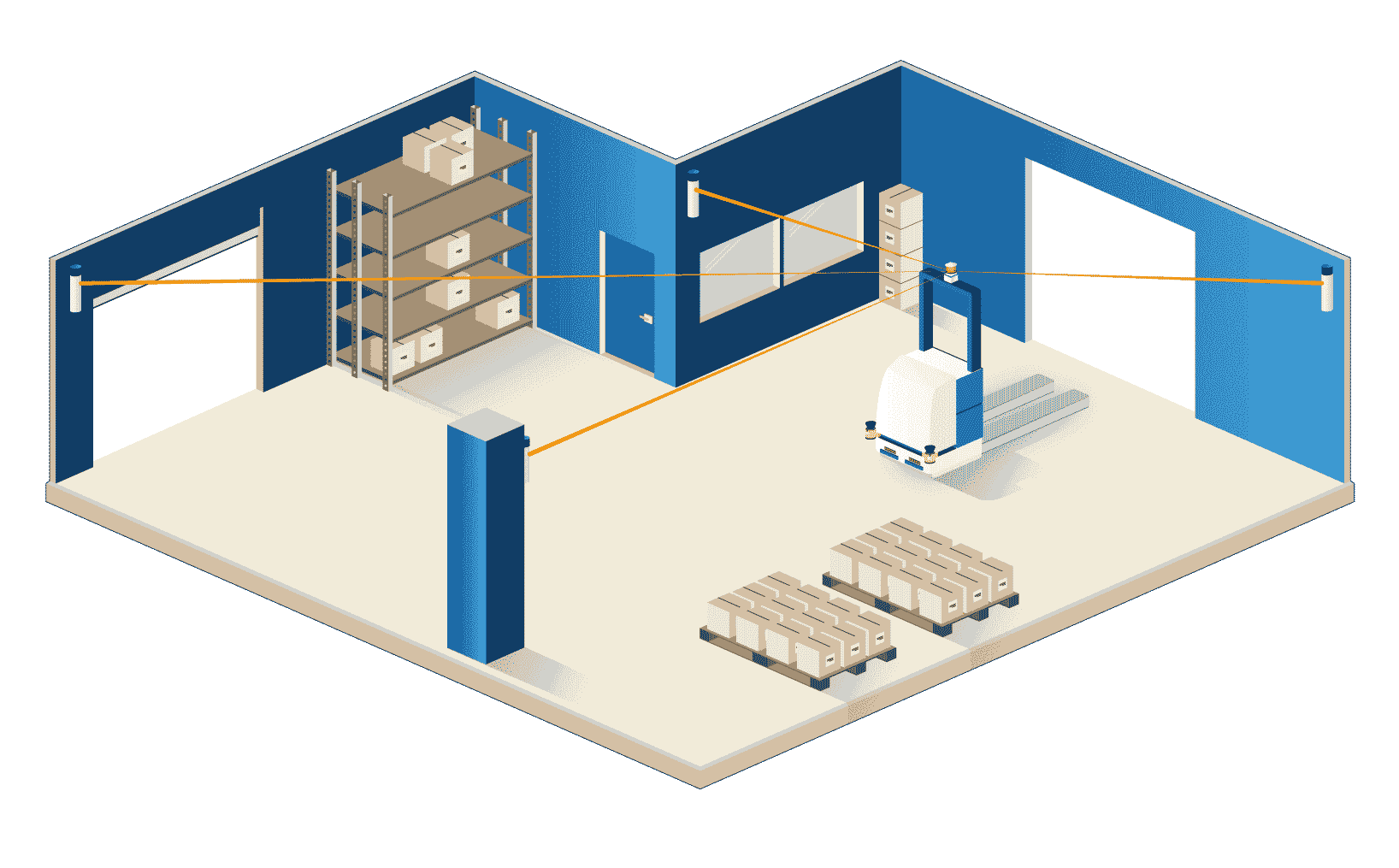
Pros
Cons
Uses cameras to recognize features in the environment, with which the
vehicle's position is calculated. The paths followed are virtual.
Pros
Cons
Uses points measured with a vehicle's laser scanner(s) to identify – and
thereafter match – structures in the environment. The the environment
is regularly re-scanned, and the paths followed are virtual.
Also called: SLAM navigation, free navigation.
Pros
Cons
Uses features measured with a laser scanner to identify – and thereafter
match – structures in the environment. The environment is scanned once,
the system then recognizes a small number of permanent features within
that environment during every future mission. The paths followed are virtual.
Also called: SLAM navigation, free navigation.
Pros
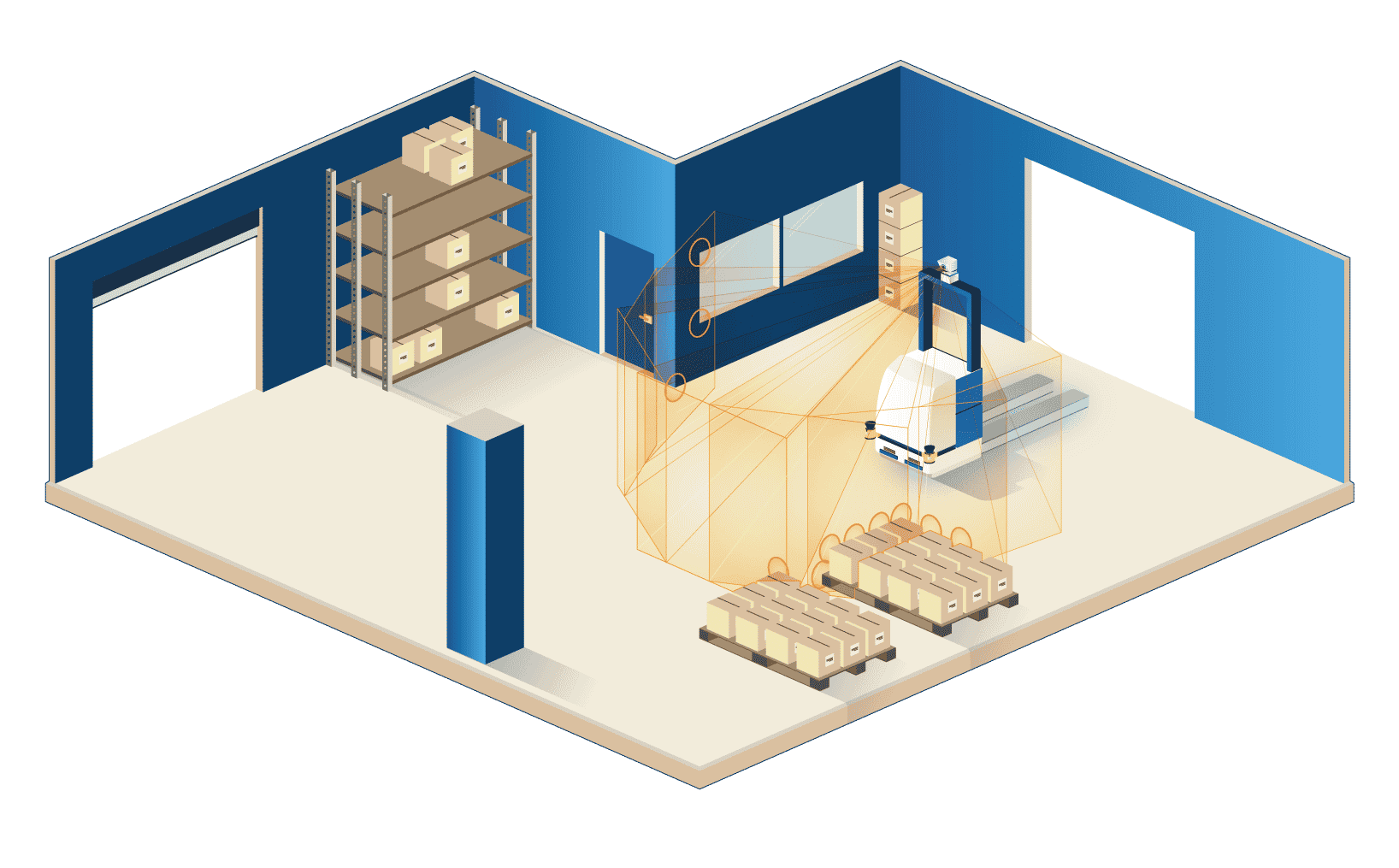
How does ANT Navigation work?
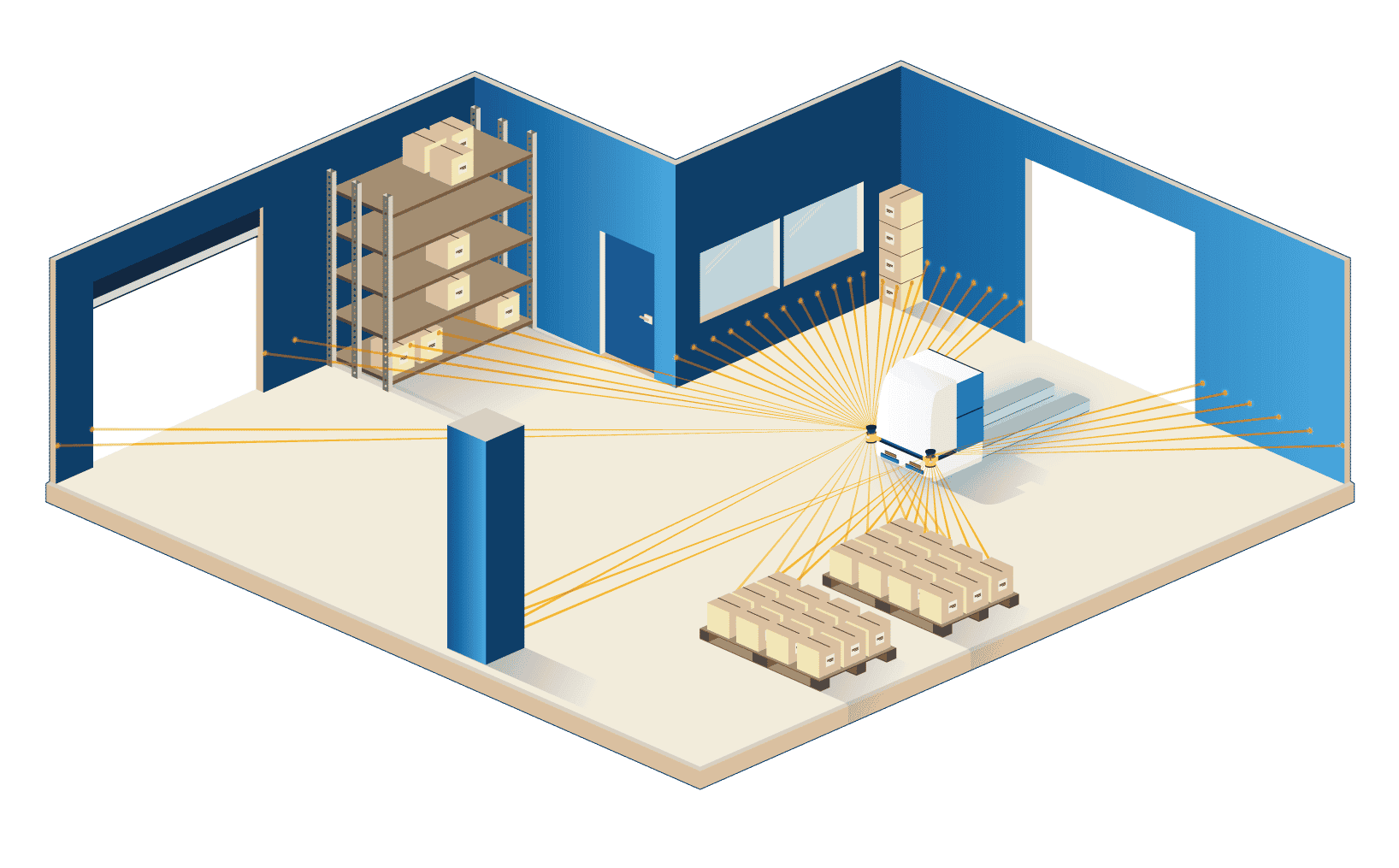
ANT natural feature navigation (sometimes called ‘natural navigation’, 'free navigation' or ‘SLAM navigation’) uses a vehicle’s existing laser safety scanners to first identify and then match permanent features in the environment, such as walls, pillars, and machines.
1. Create your map
Drive your AGV manually around the site. Our ANT lab software (supplied) records data from the vehicle’s safety laser scanners, which is then used to generate a 2D map. Lastly, ‘clean’ this map by removing any dynamic objects, leaving only permanent features such as walls and pillars. These ‘references’ will be used to calculate your vehicle’s position, allowing it to navigate effectively.

2. DEFINE YOUR OPERATION
Program your AGV's required routes. Then, add actions such as moving a lift truck's forks, setting a digital I/O, or communicating with the vehicle's PLC. Routes and actions are configured in ANT lab.
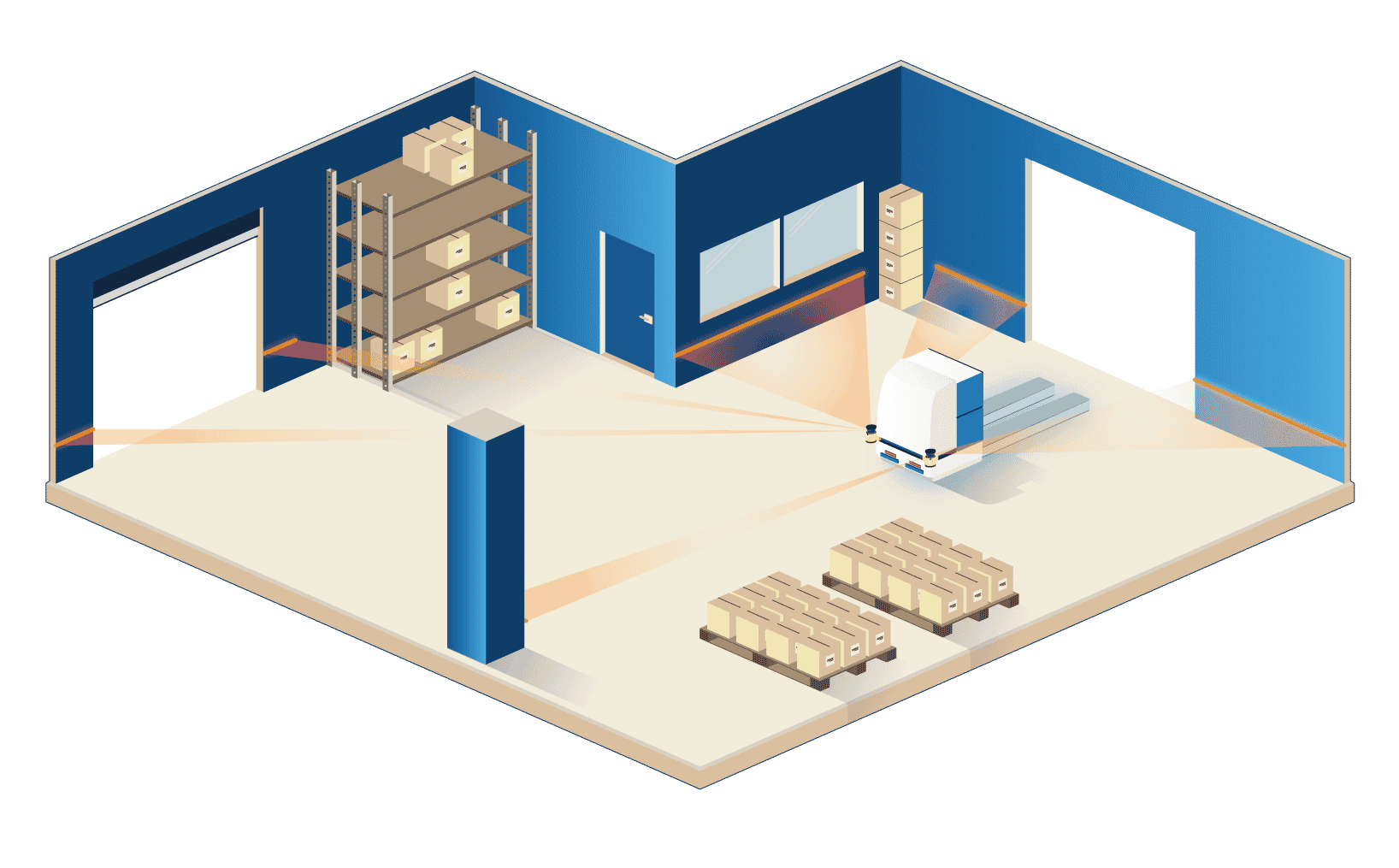
3. Go to Work
Start your first mission! Your ANT driven vehicle will use a combination of safety scanner data and odometry to move safely through the environment, following your pre-defined routes and actions. In the case of multiple AGVs, traffic and fleet management is easily handled by our ANT server software (available with ANT lite+).
What features does
ANT navigation include?
Autonomous Navigation Technology (ANT) includes a wide range of features to automate your AGV, forklift or mobile robot. Each function has been designed to bring real-world value, based on the needs of customers around the world.

Robust
localization

Optimal
vehicle control

Full kinematic support

Optimized
path follower

Obstacle avoidance option

Fork
control

Embedded mission control
Pallet, 4-leg, hitch,
and external trackers

Full integration support (incl. on-site)

Robust Localization
-
Optimal Vehicle Control
-
Full Kinematic Support
-
Optimized Path Follower
-
Obstacle Avoidance Option
-
Fork Control
-
Embedded Mission Control
-
Pallet, 4-leg & hitch trackers
-
Full Integration support (incl. on-site)

GNSS option for outdoor use
Additional
with
ANT server

Fleet
management

Intelligent mission scheduling

Traffic
control

Battery charge management

Equipment
interfacing

Mission
simulation

System
monitoring

API connection to WMS/MES/ERP
-
Fleet Management
-
Intelligent Mission Scheduling
-
Traffic Control
-
Battery Charge Management
-
Equipment Interfacing
-
Mission Simulation
-
System Monitoring
-
API Connection to WMS/MES/ERP
“After a week to prepare the map and pick/drop positions, we turned on our client’s fleet and were able to run full production the same day. We have 12 AGVs and 6 loading positions delivering to 80 unloading positions. The performance and stability of BlueBotics’ ANT lab software has really saved us a lot of time during commissioning."
Kurtis Schram![]() Application Developer, Cimcorp North America
Application Developer, Cimcorp North America
“ANT is great but what makes also the difference is the service you have. I get an answer immediately, and you always answer. This makes the difference.”
Miguel de Sebastian![]() CEO, DTA
CEO, DTA
“BlueBotics’ technology is the most robust natural feature navigation software around. We couldn’t believe its potential, or the precision possible, until we saw it with our own eyes. And when integrating ANT into our forklift trucks, the support was excellent, simply the best.”
Thanassis Papaleloudis![]() CEO, LIFTCO E.E.
CEO, LIFTCO E.E.
“We relied on BlueBotics’ very helpful and professional engineering support to develop an automated solution for transferring super-heavy components. Our AGV works hand-in-hand with our robotic arm station, delivering high efficiency with less manpower.”
Francis Tan![]() Director, Azimuth Technologies
Director, Azimuth Technologies
EXPERT INTEGRATION &
INSTALLATION SUPPORT
When you choose ANT natural feature navigation, our experienced team of engineers works closely with you to ensure the successful integration of this technology into your vehicle.
We provide on-site support as standard during this process. We even help you install your vehicle at your first customer's site. Again, at no extra cost.
Languages:
EN, FR, IT
Languages:
EN, FR
Languages:
EN, FR
23 YRS
 Of Natural
Of Natural
Feature
Navigation5,000+
ANT driven
VEHICLES IN
OPERATION1,000+
END-USER INSTALLATIONS10+
MILLION KM
DRIVEN BY ANT
Product
Finder
WHICH ANT PRODUCT DO I NEED?
To identify the best ANT navigation system for your vehicle, use our product finder or comparison table below. Or schedule a call with our team to discuss your needs.
Compare ANT Products
Localization
Control
Emulation of line following
Mission Management
Fleet Management
Outdoor operation

ANT lite+
ANT localization+
ANT localization
Let’s discuss your autonomous
navigation needs
Do you have a question about which navigation technology to choose? Would you like to discuss a specific application? Or are you curious to see an on-screen ANT demo? Click below to schedule a call with our expert team.